









A warehouse doesn’t stop moving because a robot is confused. Pallets shift, forklifts park in travel lanes, and seasonal staging zones appear overnight. The robots that fail in these conditions share one thing: they were told where to go. The ones that didn’t fail figured it out on their own.
Autonomous Mobile Robots have stepped into the gap and the adoption numbers reflect it. What separates a capable AMR from a glorified conveyor on wheels is navigation intelligence. That capability is SLAM in robotics — Simultaneous Localization and Mapping — and it is the reason modern AMRs navigate dynamically instead of following fixed paths.
| $7.07B | 44% | 81% |
| Global AMR market projected by 2032 | New 2024 deployments using SLAM + LiDAR navigation | AMR navigation software systems using SLAM algorithms |
What Is SLAM in Robotics?
SLAM describes a robot’s ability to build a map of an unfamiliar environment and determine its own position within that map simultaneously, without GPS or fixed beacons. Those two tasks are deeply entangled: to build an accurate map, you need to know where you are; to know where you are, you need an accurate map. SLAM algorithms solve both in parallel.
Think of it this way: Place an AMR in a warehouse it has never entered and ask it to deliver a pallet to aisle 14. Without SLAM, every turn and distance must be pre-programmed. With SLAM, the robot begins scanning from the moment it powers on, builds a working map as it moves, and pinpoints its location in real time. By arrival, it has a usable floor plan of the entire facility.
This is fundamentally different from line-following or RFID-guided systems, which move along predetermined paths with no understanding of their surroundings. Those systems fail at the first unexpected obstacle, SLAM-based navigation keeps working.
Why AMRs Depend On SLAM
Warehouses are not static. A pallet dropped in an aisle, a forklift near the dock, a temporary staging zone for peak season, these are daily realities. Traditional navigation treats them as failures. SLAM treats them as data.
Route flexibility matters equally. When a facility reconfigures its layout, a SLAM-equipped AMR adapts without floor modifications or manual reprogramming. Adding a robot to a SLAM fleet means it maps the facility on its first run and joins operations the same session.
| CRITERION | AMR WITH SLAM |
| Navigation | Dynamic mapping and real-time localization |
| Infrastructure | No fixed infrastructure required |
| Flexibility | Adapts to layout changes |
| Route Optimization | Continuously recalculates routes |
| Scalability | New robots self-map and deploy quickly |
| Obstacle Handling | Detects obstacles and reroutes automatically |
How Does SLAM Work In AMRs? Step-By-Step Analysis.
SLAM is a continuous loop, not a single operation. Here is how each stage plays out in a real facility.
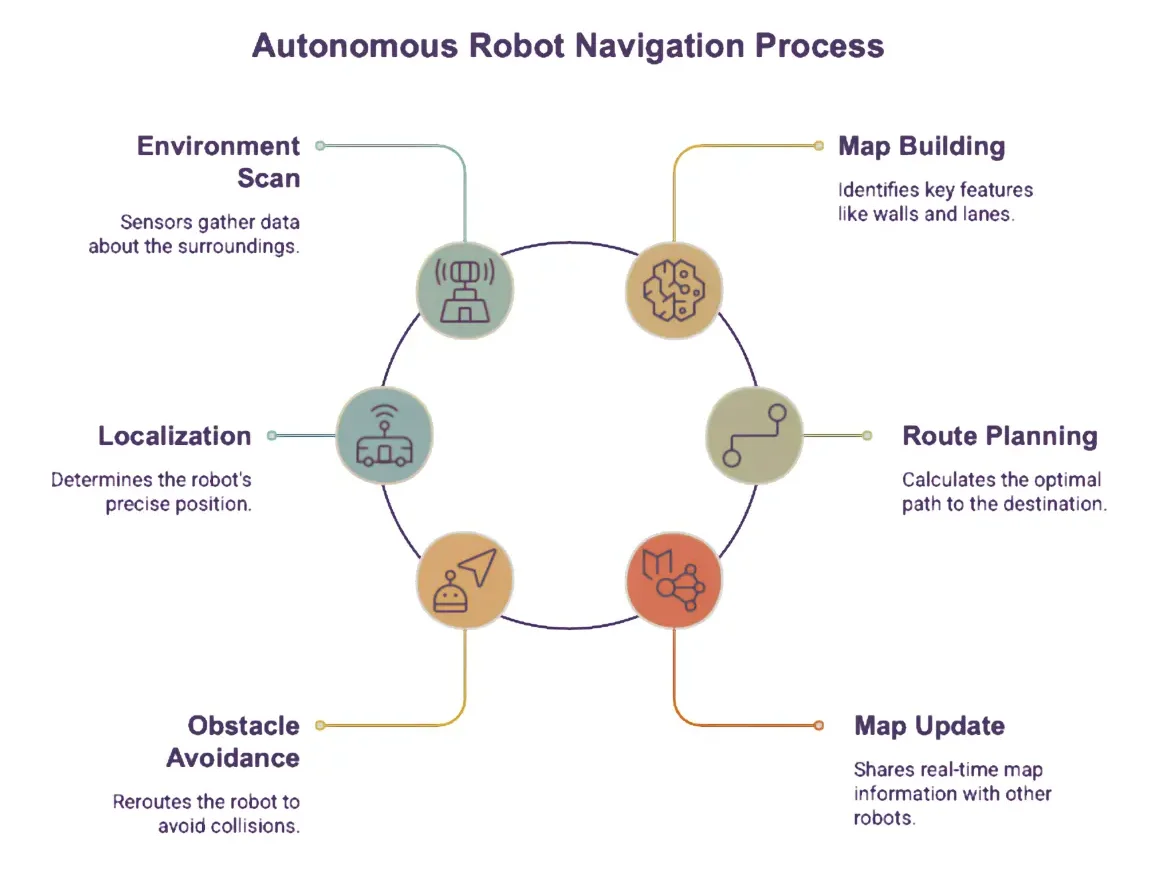 1- Environment scanning
1- Environment scanning
LiDAR emits laser pulses to produce a precise spatial point cloud. Cameras capture visual texture. Depth sensors detect low-profile obstacles. An IMU tracks acceleration through turns. Wheel encoders measure travel distance as a continuous position baseline.
2- Building the map
Sensor data feeds into a SLAM algorithm that constructs an internal model of walls, columns, racks, and open travel lanes. During initial deployment, the AMR runs a mapping pass. This baseline becomes the reference framework for all future navigation.
3- Localization
With a map in place, the robot continuously asks: Where am I right now? It compares live sensor readings against stored features using algorithms like Particle Filters or Extended Kalman Filters typically achieving centimeter-level accuracy.
4- Route planning
Knowing its position and destination, the AMR calculates an efficient path using graph-search algorithms (A*, Dijkstra variants). A forklift that has moved into a corridor triggers an immediate reroute with no stopping, no human intervention.
5- Dynamic obstacle avoidance
Static obstacles are encoded in the map. Moving personnel, parked equipment, and other robots appear through the live sensor feed. In busy fulfillment centers, an AMR may handle dozens of micro-reroutes per shift without any human input.
6- Continuous map updates
The AMR continuously reconciles observations against the stored map and flags structural changes, new columns, reconfigured racks, and added conveyors. In multi-robot fleets, these updates are shared across every unit so the whole fleet runs on current data.
Types of SLAM Algorithms
SLAM in robotics is not a single algorithm, it’s a family of approaches, each making different tradeoffs between accuracy, computational cost, and suitability for different environments.
Filter-based SLAM (EKF-SLAM, UKF-SLAM): The Extended Kalman Filter was the foundational SLAM approach. The robot maintains a probability distribution over its pose and landmark positions, updating it with each sensor reading. Accurate and well-understood, but computationally expensive cost scales as O(n²) with the number of landmarks, making it impractical for large warehouse floors with hundreds of features.
Graph-based SLAM: Today’s industrial standard. Robot poses are represented as nodes in a graph; edges encode spatial constraints between them (e.g., “these two poses are 2.4m apart”). When the robot revisits a known location called loop closure the graph is optimized globally to minimize accumulated error. Tools like g2o and GTSAM power this approach. Most commercial AMRs, including platforms from MiR, Fetch, and Boston Dynamics, rely on graph-based SLAM as their core mapping engine.
Particle filter SLAM (FastSLAM): Represents the robot’s location uncertainty as a cloud of weighted “particles” hypothetical positions and reweights them as sensor data arrives. Handles non-linear motion and dynamic environments naturally. Computationally cheaper than EKF at scale, though still memory-intensive with many landmarks. Common in earlier AMR deployments and still used in dynamic settings.
Deep learning SLAM: The newest category. Neural networks replace hand-crafted feature detectors (ORB, SIFT) with learned representations, and in some systems predict pose directly from sensor data end-to-end. Systems like DROID-SLAM and NeRF-SLAM show strong performance in visually complex environments. Currently maturing from research into commercial deployment, particularly in Visual SLAM applications.
| Algorithm Type | Core Method | Scales To Large Maps? | Dynamic Environments | Commercial Use |
| Filter-Based (EKF) | Kalman Update | No | Limited | Legacy Systems |
| Graph-Based | Pose Graph Optimization | Yes | Moderate | Most Modern AMRs |
| Particle Filter | Weighted Samples | Moderate | Good | Dynamic Facilities |
| Deep Learning | Neural Network | Yes | Excellent | Emerging |
Key Technologies Behind SLAM in Robotics
LiDAR SLAM
It uses laser-based point clouds as its primary input. It performs reliably across all lighting conditions including complete darkness in cold storage and delivers centimeter-level accuracy in cluttered environments. According to Mordor Intelligence, LiDAR SLAM held a 40.88% share of the AMR navigation technology market in 2025.
Visual SLAM
It uses cameras to identify edges, corners, and texture patterns, inferring position from how those features shift across frames. It costs less than LiDAR setups and performs well in visually rich, well-lit environments.
According to MarketsandMarkets, vision-based systems are forecast to expand at a 20.64% CAGR through 2031 as camera resolution and onboard compute improves.
Sensor fusion
Most modern AMRs combine LiDAR, cameras, IMU, and encoders into a unified spatial model. Each sensor compensates for the weaknesses of the others. Current AMR navigation software integrates data from three to six sensor types per robot, significantly more robust than any single input could produce alone.
Newer deployments pair SLAM with machine learning that improves over time. An AMR that learns a specific corridor is consistently congested during certain hours can proactively route around it. Real-time path recalculation in leading systems now occurs at intervals below 50 milliseconds, improving obstacle avoidance accuracy by up to 42%.
| BASIS | LIDAR SLAM | VISUAL SLAM |
| Primary sensor | Laser range finder | Camera(s) |
| Accuracy | Very high
Centimeter-level |
High
Moderate in dynamic scenes |
| Low-light performance | Excellent | Poor
Needs adequate lighting |
| Cost | Higher | Lower |
| Best environments | Industrial, warehouse, cold storage | Retail, office, visually rich spaces |
| Surface sensitivity | Struggles with reflective spaces | Struggles in visually uniform spaces |
Benefits Of SLAM-Powered AMRs
Faster deployment
No tape, wires, or beacons. AMRs self-map and are operational in the same session.
Dynamic route optimization
Recalculates based on live conditions traffic, obstacles, congestion every shift.
Productivity gains
Facilities using robotics report >27% productivity improvement in 62% of cases.
Worker safety
Detects personnel from meters away and stops or reroutes before a close approach.
Reduced downtime
Automatic rerouting eliminates stoppage events that need human intervention.
Fleet scalability
Add a unit, it maps the facility, and joins the fleet. No infrastructure cost per robot.
Challenges Of SLAM Technology
- Reflective and transparent surfaces remain a challenge for LiDAR systems. Glass walls, polished concrete, and metallic shelving can produce inconsistent reflections. Careful commissioning and supplementary sensors mitigate this in most real-world facilities.
- High foot traffic zones make it harder to distinguish a temporary obstacle from a permanent map feature. SLAM systems handle this probabilistically, but dense human-traffic areas require parameter tuning during deployment.
- Initial mapping complexity in very large or multi-level facilities requires structured planning that a straightforward single-floor warehouse does not. A 500,000 sq ft distribution center with mezzanines takes more commissioning time than a simpler footprint.
The Future Of SLAM In Autonomous Mobile Robots
The next evolution of SLAM in robotics moves beyond geometry into contextual understanding of the operating environment. 3D semantic mapping moves beyond geometry: a semantically aware AMR understands it is looking at a pallet rack, a pedestrian walkway, or a loading dock, enabling far more nuanced navigation and tighter WMS integration.
Multi-robot coordination is becoming a standard expectation. When a fleet shares a unified map and communicates in real time, route planning accounts for every robot’s position and intent simultaneously reducing congestion and improving fleet-level throughput.
Industry 4.0 integration is extending AMR fleets from transport units to active participants in facility-wide operational intelligence, connecting to WMS platforms, ERP systems, and real-time production scheduling in ways that reactive, fixed-route systems simply cannot support.
SLAM is not an add-on feature, it is the foundational capability that makes infrastructure-free, truly autonomous navigation practical at industrial scale. Facilities that understand the technology and deploy it with precision will consistently outperform those that do not.






